系统说明
CAN 通信系统
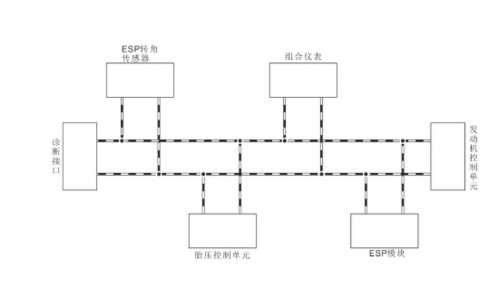
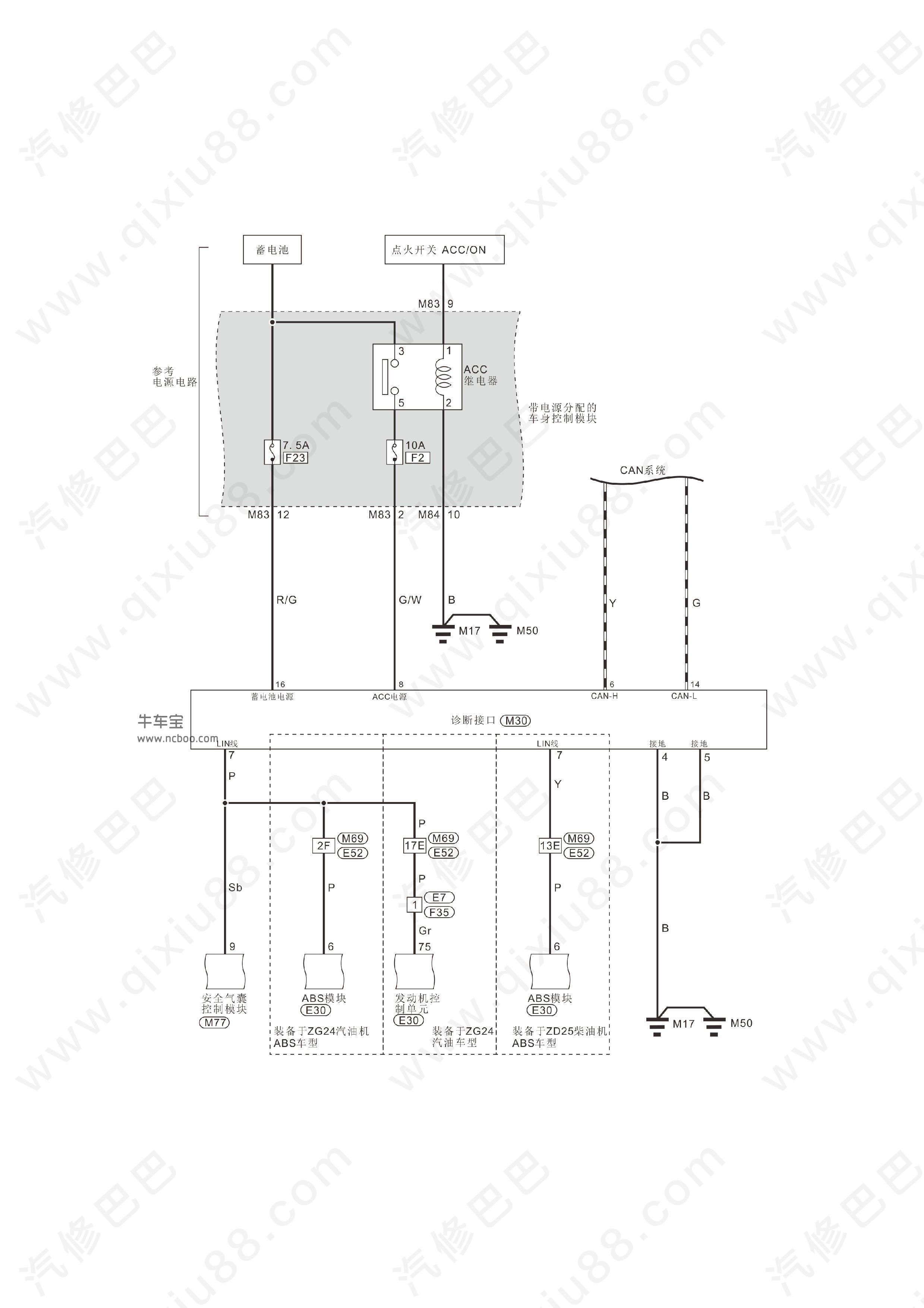
CAN ( 控制器局域网) 是一种用于实时通信的串行通信线路。它是一种车用的多路通信线路,具备高的数据通信速度和很强的检错能力。车辆上装备了许多电子控制单元,在操作过程中控制单元之间相互连接、共享信息 ( 并非独立的)。在 CAN 通信中,控制单元由两条通信线路连接 (CAN-H 线路、CAN-L 线路),这样可以利用更少的线路进行高速率的信息传送。各控制单元都能够发送/ 接收数据,但仅选择性地读取所需要的数据。
系统概述
• CAN通信为多路通信系统。通过将控制单元与两个通信线路(CAN-H和CAN-L)连接,该系统可以高速传输和接收大量的数据。
• CAN网络上的控制单元利用CAN通信控制电路传输信号。它们仅从其他控制单元接收必需的信号以操作不同的功能。
• CAN通信线采用双绞线型(两线绞扭在一起)以降噪。
• 各控制单元在传输CAN通信信号时向终端电路传递电流。终端电路在CAN-H和CAN-L之间产生一个电位差。 CAN通信系统根据电位差传输和接收CAN通信信号。

牛车宝,Copyright © 2006-2020(NCBOO.COM)版权所有 赣ICP备17011314号-1  赣公网安备 36010802000474号
赣公网安备 36010802000474号
牛车宝汽车维修手册库,提供汽车维修电路图,汽车维修技术网,汽车维修手册,汽车维修等资料下载。